FANUC zacieśnia współpracę z firmą NVIDIA
1. Intuicyjna obsługa robotów w "wirtualnej fabryce" dzięki NVIDIA Isaac Sim i ROBOGUIDE
FANUC jeszcze bardziej wzmocnił integrację między otwartą platformą referencyjną do symulacji robotów NVIDIA Isaac Sim a oprogramowaniem symulacyjnym robotów ROBOGUIDE, umożliwiając intuicyjną obsługę w środowisku wirtualnej fabryki oraz tworzenie bardzo dokładnych, w pełni zintegrowanych cyfrowych bliźniaków.
Podczas Międzynarodowych Targów Robotyki w Tokio w grudniu ubiegłego roku FANUC zaprezentował technologię umożliwiającą import symulacji ruchu robota utworzonych w ROBOGUIDE do NVIDIA Isaac Sim. Pozwala to odwzorować w środowisku wirtualnym precyzyjne trajektorie i czasy cykli przy użyciu tych samych algorytmów sterowania co w rzeczywistym robocie. Obecnie, dzięki rozszerzonej integracji, oba systemy są jeszcze ściślej powiązane, oferując bardziej praktyczne i efektywne środowisko symulacyjne do testowania robotów oraz wirtualnego uruchamiania.
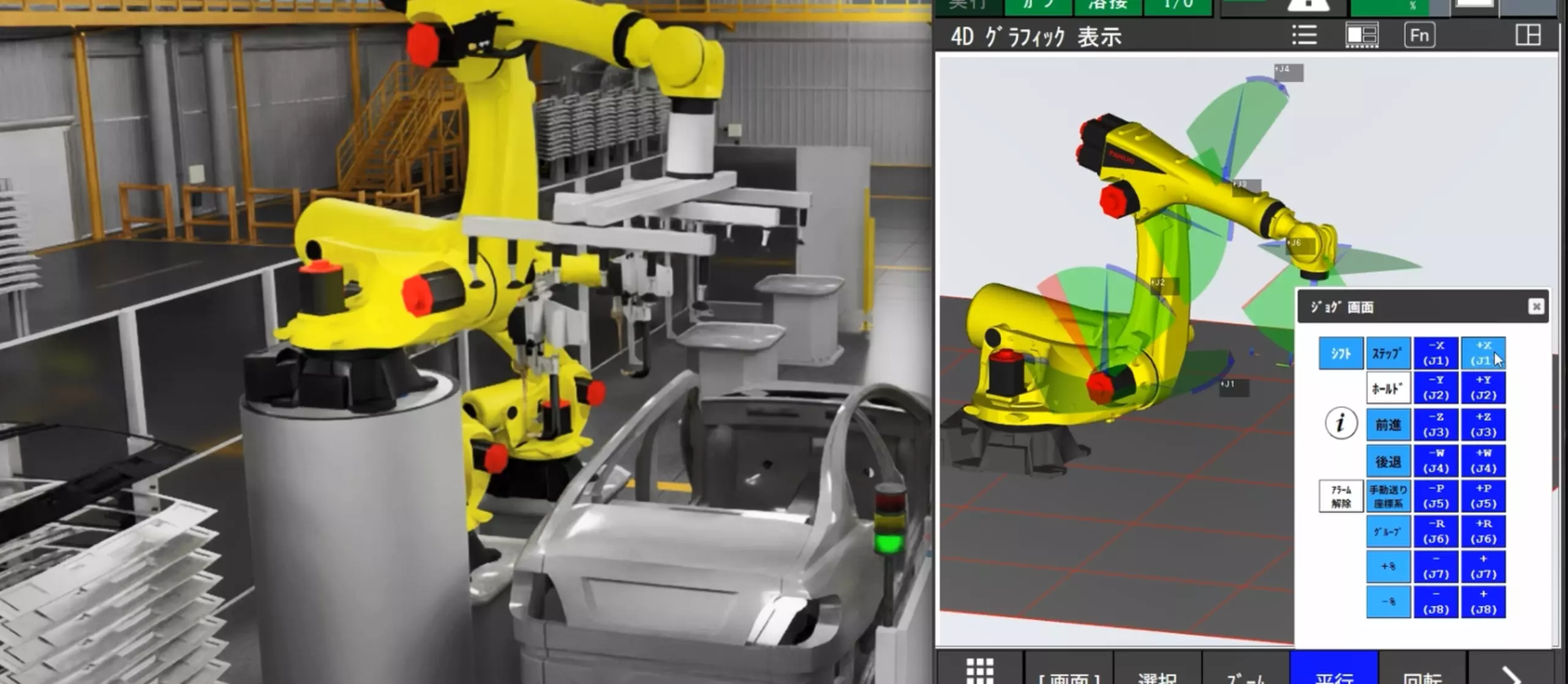
Pierwszy tryb integracji zakłada, że główną rolę odgrywa NVIDIA Isaac Sim, podczas gdy ROBOGUIDE działa w tle, zapewniając dokładne odwzorowanie zachowania robota w przestrzeni wirtualnej. ROBOGUIDE jest ściśle zintegrowany z Isaac Sim poprzez ciągłą, bezpośrednią komunikację. W tym środowisku użytkownicy mogą intuicyjnie sterować robotami w czasie rzeczywistym w Isaac Sim – zarówno z wirtualnych, jak i fizycznych paneli sterujących (teach pendant) podłączonych do ROBOGUIDE – tak jakby obsługiwali prawdziwego robota. Możliwe jest wykonywanie ruchów ręcznych (jogging), programowanie, uruchamianie programów i weryfikacja wyników bezpośrednio w Isaac Sim. Umożliwia to efektywne przygotowanie instalacji oraz projektowanie procesów w środowisku symulacji fizycznych i czujnikowych przyspieszanych przez GPU.
Dzięki wykorzystaniu otwartego środowiska uczenia robotów NVIDIA Isaac Lab oraz bibliotek NVIDIA Omniverse, możliwe staje się tworzenie bardzo dokładnych symulacji zadań, które wcześniej były trudne do odwzorowania – takich jak manipulowanie elastycznymi elementami (np. kablami) czy operacje montażowe i osadzania. Roboty działające w Isaac Sim zachowują identyczne trajektorie i czasy cykli jak rzeczywiste maszyny dzięki integracji z ROBOGUIDE, eliminując różnice między symulacją a rzeczywistością. Środowisko to wspiera również uczenie ze wzmocnieniem oraz uczenie przez naśladowanie, przyspieszając rozwój i wdrażanie systemów Physical AI.
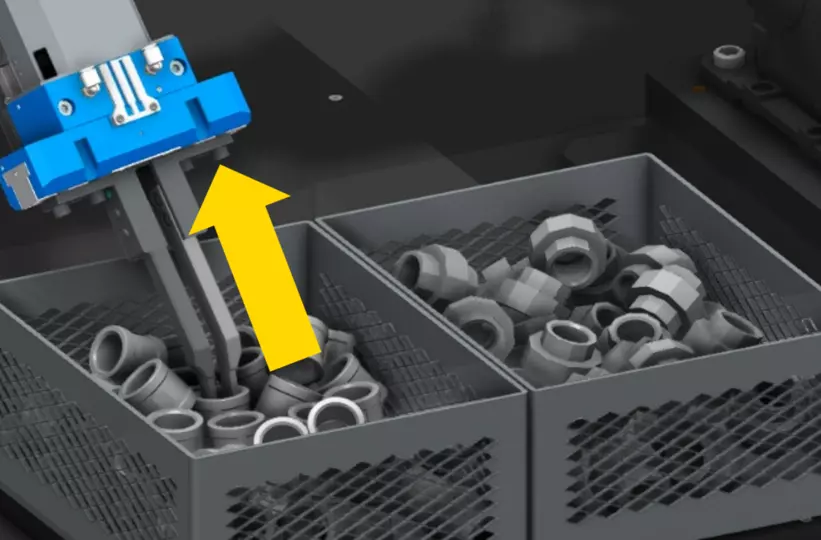
Drugi tryb integracji przewiduje odwrotną konfigurację – to ROBOGUIDE pełni rolę wiodącą, a mechanizm symulacji fizycznej NVIDIA PhysX działa w tle, umożliwiając zaawansowane symulacje. Dzięki temu rozszerzeniu ROBOGUIDE wykorzystuje teraz PhysX do dokładnego odwzorowania złożonych procesów, takich jak losowe pobieranie elementów z pojemników (bin picking), które wcześniej były trudne do symulowania. Elementy ułożone w sposób przypadkowy mogą być realistycznie odwzorowane dzięki modelowaniu fizycznemu, a system wizyjny 3D ROBOGUIDE wykrywa ich położenie i umożliwia robotom wykonywanie operacji pobierania i odkładania. Wirtualnie można odtworzyć rzeczywiste scenariusze – np. sytuacje, w których robot nie jest w stanie pobrać konkretnego elementu i musi wybrać inny.
Postęp ten pozwala użytkownikom przeprowadzać analizę wykonalności dla systemów typu bin picking całkowicie w środowisku wirtualnym, eliminując konieczność czasochłonnych testów z użyciem rzeczywistych detali. W połączeniu z NVIDIA PhysX, ROBOGUIDE znacząco zwiększa efektywność projektowania i wdrażania takich systemów, które wcześniej wymagały dużego nakładu czasu i specjalistycznej wiedzy na miejscu.
>
2. Robot FANUC i model bazowy NVIDIA GR00T N do składania T-shirtów metodą uczenia przez naśladowanie
Podczas majowego pokazu New Product Open House, firma FANUC zademonstrowała system z dwoma ramionami, wykorzystujący dwa roboty współpracujące CRX do składania T-shirtów przy użyciu uczenia przez naśladowanie (imitation learning) oraz otwartego modelu bazowego robotyki NVIDIA Isaac GR00T N. Składanie elastycznych obiektów, takich jak koszulki, wymaga ciągłego dostosowywania ruchów robota do zmieniającego się kształtu materiału, co sprawia, że zadanie to jest trudne do realizacji przy użyciu tradycyjnych metod programowania odtworzeniowego lub kompensacji trajektorii na podstawie systemów wizyjnych. W prezentowanym rozwiązaniu operator wykonuje proces składania przy użyciu robotów CRX, a system uczy się na podstawie tych przykładów dzięki metodzie uczenia przez naśladowanie. Dwuramienny system CRX jest następnie trenowany tak, aby odtworzyć zadanie i opanować niezbędne techniki składania.
Dzięki generowaniu ruchów w czasie rzeczywistym, CRX potrafią autonomicznie składać T-shirty, jednocześnie rozpoznając obiekt za pomocą kamer. Tradycyjnie ruchy robotów uczone przez naśladowanie były często segmentowane i mało płynne. Połączenie zaawansowanej technologii sterowania ruchem FANUC z modelem NVIDIA GR00T N umożliwia jednak uzyskanie płynnych i ciągłych ruchów. Odwiedzający mogą zobaczyć na żywo demonstrację, w której dwuramienny robot autonomicznie składa T-shirty w czasie rzeczywistym.
>

3. System robotów FANUC oparty na platformie NVIDIA Jetson Thor
Podczas Międzynarodowych Targów Robotyki 2025 w Tokio FANUC zaprezentował robota AI „unikającego kolizji z człowiekiem”, opracowanego w oparciu o otwartą platformę robotów FANUC. System został ulepszony poprzez zastosowanie najnowszego komputera robotycznego NVIDIA Jetson Thor.
Dzięki zastąpieniu modułu NVIDIA Jetson AGX Orin modułem Jetson T5000, moc obliczeniowa AI systemu wzrosła ponad 7,5‑krotnie. Na targach odwiedzający mogą zobaczyć robota, który szybciej i płynniej reaguje na ruchy człowieka, wykorzystując zaawansowane możliwości platformy Jetson Thor.
Na wystawie New Product Open House firmy FANUC w maju tego roku, odwiedzający mogą na własne oczy zobaczyć działanie robotów w wirtualnej przestrzeni, wysokoprecyzyjne symulacje, symulacje fizyczne z wykorzystaniem NVIDIA PhysX, demonstracje robotów dwuramiennych uczonych metodą naśladowania w oparciu o modele bazowe robotyki NVIDIA, a także systemy robotów współpracujących wykorzystujące najnowszą platformę edge computing NVIDIA.
Inne wiadomości

Tworzenie empatycznych robotów



Roboty naprawiają tory kolejowe

Mistrzostwa Europy dla Młodych Ekspertów Robotyki

FANUC zaprezentuje przyszłą platformę CNC na targach EMO Hannover 2023

Młodzi integratorzy robotów w centrum uwagi

Zrównoważony rozwój, efektywność energetyczna i niezawodność – główne tematy prezentacji FANUC na...

FANUC wysyła milionowego robota

Rozwiązania dla przemysłu obrabiarek

FANUC i Volvo Cars podpisują globalną umowę

Nagroda za przyjazność dla klimatu
FANUC napędza maszyny do osiągania maksymalnej wydajności
