A FANUC tovább erősíti együttműködését az NVIDIA-val
1. Intuitív robotkezelés „virtuális gyárban” az NVIDIA Isaac Sim és a ROBOGUIDE segítségével
A FANUC tovább erősítette az integrációt az NVIDIA nyílt robotikai szimulációs referenciakeretrendszere, az NVIDIA Isaac Sim, valamint a FANUC robotikai szimulációs szoftvere, a ROBOGUIDE között. Ennek köszönhetően lehetővé válik az intuitív robotkezelés egy virtuális gyárkörnyezetben, valamint a nagy pontosságú, zökkenőmentesen integrált digitális ikrek megvalósítása.
A tavaly decemberben Tokióban megrendezett Nemzetközi Robotkiállításon a FANUC bemutatta azt a technológiát, amely lehetővé teszi a ROBOGUIDE-ban létrehozott robotmozgás-szimulációk importálását az NVIDIA Isaac Sim környezetébe. Ezáltal a valós robotvezérlési algoritmusok alkalmazásával pontos pályák és ciklusidők reprodukálhatók egy virtuális környezetben. A továbbfejlesztett integrációnak köszönhetően a két rendszer ma már még szorosabban kapcsolódik egymáshoz, így még gyakorlatiasabb és hatékonyabb szimulációs környezetet biztosít a robotok teszteléséhez és a virtuális üzembe helyezéshez.
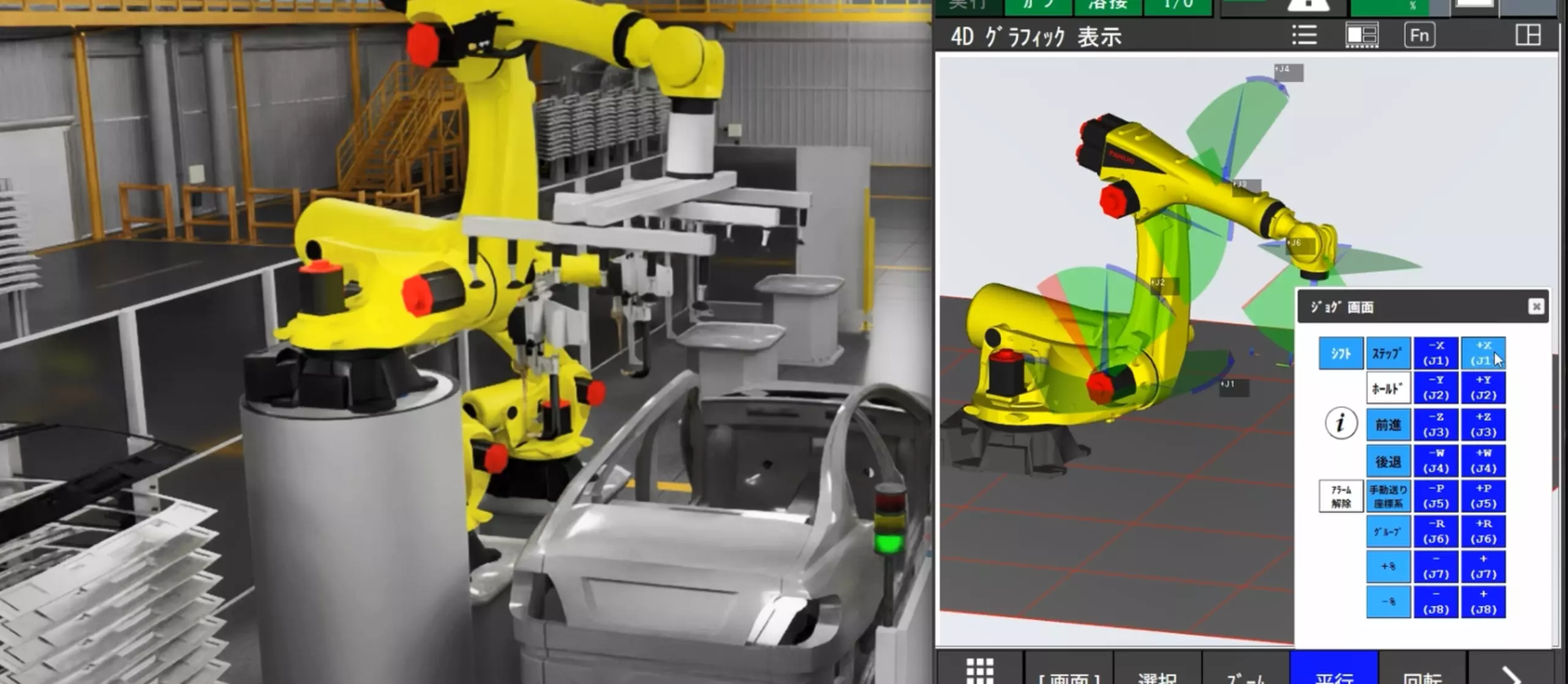
Az első integrációs módban az NVIDIA Isaac Sim áll az előtérben, míg a ROBOGUIDE a háttérben működve biztosítja a robotok pontos viselkedését a virtuális térben. A ROBOGUIDE szorosan integrált az Isaac Sim környezetébe, folyamatos, közvetlen kommunikáció mellett. Ebben az új környezetben a felhasználók valós időben, intuitív módon vezérelhetik a robotokat az Isaac Sim felületén, akár virtuális, akár a ROBOGUIDE-hoz csatlakoztatott fizikai teach pendant segítségével – ugyanúgy, mintha egy valódi robotot irányítanának. A felhasználók kézi mozgatást (jogging), robotprogramok betanítását, futtatását és az eredmények ellenőrzését is közvetlenül az Isaac Sim környezetében végezhetik. Ez lehetővé teszi a hatékony előzetes tervezést és folyamatkialakítást GPU-gyorsított, fizikailag pontos szenzor- és környezetszimulációk mellett.
Az NVIDIA Isaac Lab nyílt robotikai tanulási keretrendszer, valamint az NVIDIA Omniverse könyvtárak további kihasználásával olyan feladatok nagy pontosságú szimulációja válik lehetővé, amelyek korábban nehezen voltak modellezhetők – például rugalmas elemek (pl. kábelek) kezelése, vagy beszúrási és összeszerelési műveletek. Az Isaac Sim környezetben működő robotok a ROBOGUIDE integráción keresztül azonos pályákat és ciklusidőket követnek, mint a valós berendezések, ezáltal megszüntetve a szimuláció és a valós működés közötti eltérést. A kombinált környezet támogatja a megerősítéses tanulást és az imitációs tanulást is, felgyorsítva a Physical AI rendszerek értékelését és bevezetését.
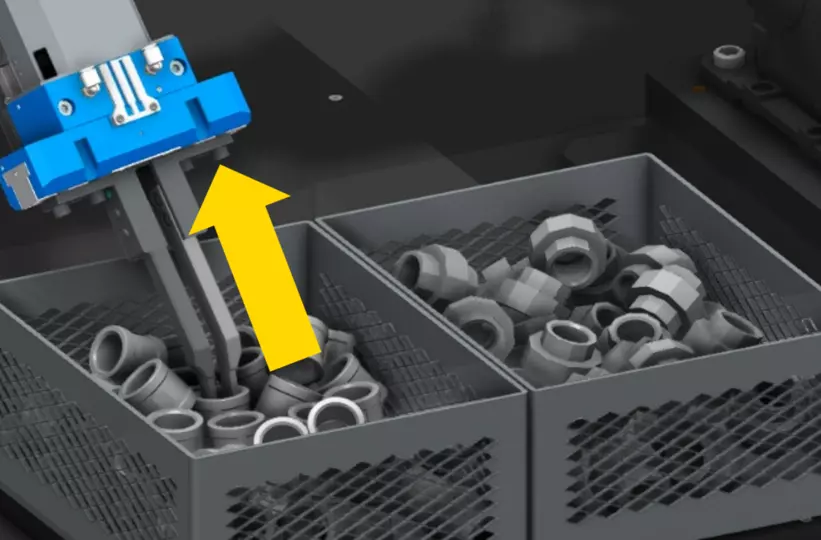
A második integrációs módban a ROBOGUIDE kerül előtérbe, miközben az NVIDIA PhysX fizikai motor biztosítja a háttérben a fejlett szimulációs képességeket. Ennek köszönhetően a ROBOGUIDE immár a PhysX technológiát használja, lehetővé téve olyan összetett feladatok pontos szimulációját, mint például a bin picking, amely korábban nehezen volt modellezhető. A véletlenszerűen felhalmozott alkatrészek fizikai alapú modellezéssel valósághűen szimulálhatók, miközben a ROBOGUIDE 3D Vision rendszere azonosítja az alkatrészek pozícióját, és lehetővé teszi a robotok számára a pick-and-place műveletek végrehajtását. A valós forgatókönyvek – például amikor egy robot nem tud kiemelni egy adott alkatrészt, és alternatívát választ – virtuálisan is reprodukálhatók.
Ez a fejlesztés lehetővé teszi a felhasználók számára, hogy a bin picking rendszerek megvalósíthatósági vizsgálatát teljes mértékben virtuális környezetben végezzék el, anélkül, hogy valós alkatrészekkel kellene időigényes próbákat végezniük. Az NVIDIA PhysX technológiával kombinálva a ROBOGUIDE jelentősen növeli a bin picking rendszerek tervezésének és bevezetésének hatékonyságát, amelyek korábban jelentős helyszíni idő- és szakértelem-igénnyel jártak.
2. FANUC robot és az NVIDIA GR00T N robotikai alapmodell: pólóhajtogatás imitációs tanulással
A FANUC a májusi New Product Open House rendezvényén bemutatott egy kétkaros rendszert, amely két CRX kollaboratív robot (kobot) segítségével pólókat hajtogat imitációs tanulással, az NVIDIA nyílt robotikai alapmodelljére, az NVIDIA Isaac GR00T N-re építve. A rugalmas objektumok – például pólók – kezelése folyamatos alkalmazkodást igényel a változó formákhoz, ami hagyományos, visszajátszáson alapuló betanítással vagy látásalapú pályakorrekcióval nehezen valósítható meg.
Ebben a demonstrációban egy operátor a CRX robotok segítségével végezte el a hajtogatási feladatot, miközben a rendszer ezekből a példákból imitációs tanulással tanult. A kétkaros CRX rendszer betanításra került a feladat reprodukálására, és elsajátította a hajtogatási folyamat végrehajtásához szükséges műveleteket.
Az imitációs tanulással valós időben generált mozgások révén a CRX robotok autonóm módon hajtogatták a pólókat, miközben kamerák segítségével vizuálisan felismerték az objektumot. Hagyományosan az imitációs tanulással létrehozott robotmozgások gyakran szaggatottnak és darabosnak tűntek. A FANUC fejlett mozgásvezérlési technológiájának és az NVIDIA GR00T N modellnek az együttes alkalmazásával azonban a rendszer folyamatos, egyenletes mozgást biztosít.
A látogatók élőben is megtekinthették, ahogy a kétkaros robotrendszer valós időben, autonóm módon hajtogatta a pólókat.

3. FANUC robotrendszer az NVIDIA Jetson Thor platformra építve
A FANUC a 2025-ös tokiói Nemzetközi Robotkiállításon (IREX-en) bemutatott egy „emberrel való ütközést elkerülő AI-robotot”, amely a FANUC robotok nyílt platformjára épül. A rendszer azóta továbbfejlesztésre került az NVIDIA legújabb robotikai számítógépével, az NVIDIA Jetson Thor platformmal.
Az NVIDIA Jetson AGX Orin modul Jetson T5000 modulra történő cseréjével a rendszer AI-számítási kapacitása több mint 7,5-szeresére nőtt. A kiállításon a látogatók megtapasztalhatták, hogyan képes a robot gyorsabban és folyamatosabban reagálni az emberi mozgásokra, kihasználva a Jetson Thor kiemelkedő teljesítményét.
A FANUC májusi New Product Open House rendezvényén a látogatók első kézből ismerhették meg a robotok működését virtuális környezetben, a nagy pontosságú szimulációkat, az NVIDIA PhysX alapú fizikai modellezést, az NVIDIA robotikai alapmodelljére épülő, imitációs tanulással betanított kétkaros robotok demonstrációit, valamint a legújabb NVIDIA edge computing platformokra épülő együttműködő robotrendszereket.
Egyéb hírek

Empatikus robotok fejlesztése



Robotok javítják a vasúti síneket

European Championship for Young Robot Experts

FANUC to Provide Glimpse of Future CNC Platform at EMO Hannover 2023

Fiatal robot rendszerintegrátorok a reflektorfényben

Fenntarthatóság, energiahatékonyság és megbízhatóság a FANUC FAKUMA kiállításának középpontjában

A FANUC leszállítja egymilliomodik robotját

Solutions for the Machine Tool Industry

FANUC and Volvo Cars Sign Global Contract

Elismerés a klímabarát működésért
FANUC Drives Machines to Peak Performance
