Společnost FANUC posiluje spolupráci se společností NVIDIA
1. Intuitivní ovládání robotů ve "virtuální továrně" pomocí NVIDIA Isaac Sim & ROBOGUIDE
FANUC dále posílil integraci mezi otevřeným referenčním rámcem pro simulaci robotů společnosti NVIDIA NVIDIA Isaac Sim a simulačním softwarem pro roboty ROBOGUIDE společnosti FANUC, což umožňuje intuitivní ovládání ve virtuální továrně a realizaci vysoce přesných, bezproblémově integrovaných digitálních dvojčat.
Na Mezinárodní výstavě robotů, která se konala v prosinci loňského roku v Tokiu, předvedla společnost FANUC technologii, která importuje simulace pohybu robotů vytvořené v softwaru ROBOGUIDE do softwaru NVIDIA Isaac Sim a reprodukuje přesné trajektorie a časy cyklů ve virtuálním prostředí pomocí stejných řídicích algoritmů jako skutečný robot. Nyní, díky vylepšené integraci, jsou oba systémy těsněji propojeny a poskytují ještě praktičtější a efektivnější simulační prostředí pro testování robotů a virtuální uvádění do provozu.
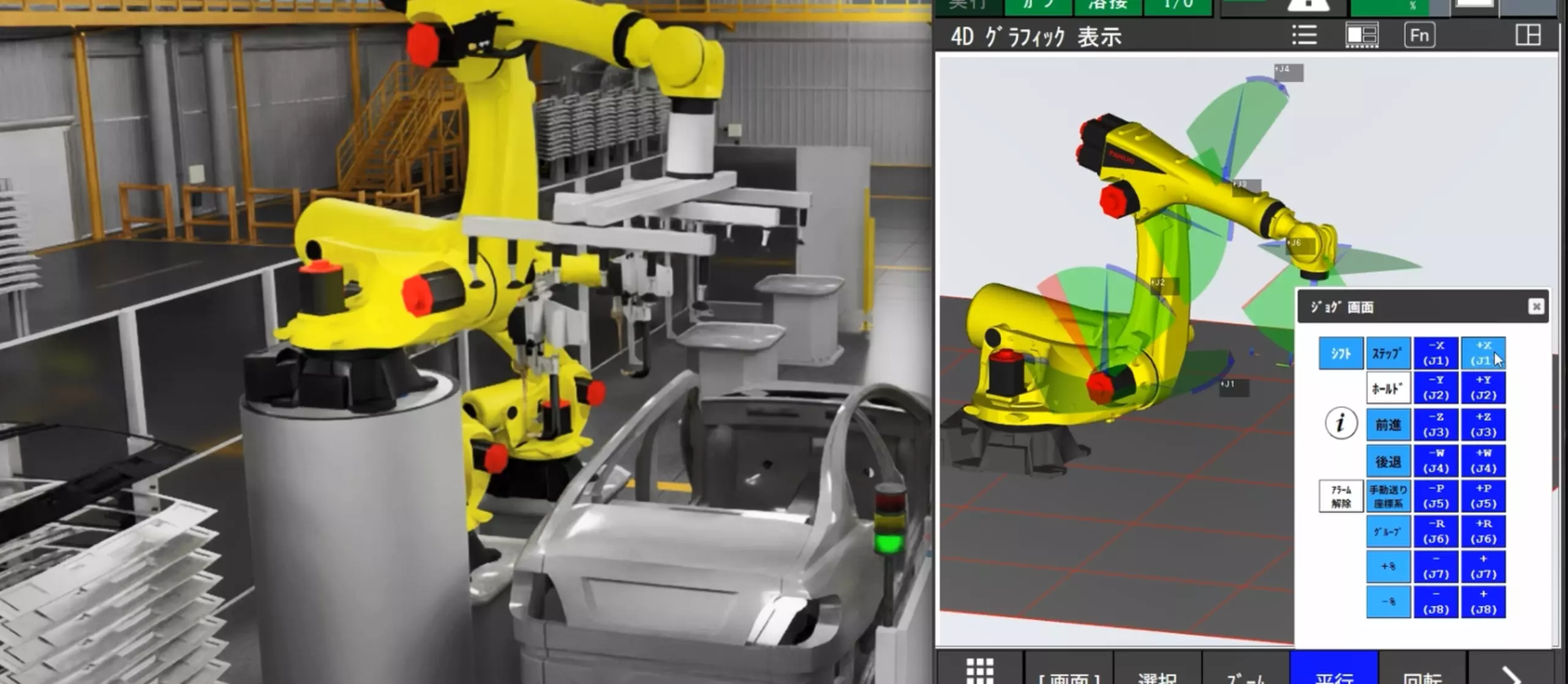
První způsob integrace staví NVIDIA Isaac Sim do popředí, přičemž ROBOGUIDE pracuje na pozadí a zajišťuje přesné chování robotů ve virtuálním prostoru. ROBOGUIDE má úzkou integraci s Isaac Sim, přičemž probíhá nepřetržitá přímá komunikace. V tomto novém prostředí mohou uživatelé intuitivně ovládat roboty v Isaac Sim v reálném čase z virtuálních nebo fyzických Teach Pendants připojených k ROBOGUIDE - stejně, jako by ovládali skutečného robota. Uživatelé mohou provádět joggingové operace, učit programy robotů, provádět programy a ověřovat výsledky přímo v prostředí Isaac Sim. To umožňuje intuitivní a efektivní předinstalační studie a design procesů pro roboty v rámci fyzikálně přesných simulací senzorů a prostředí akcelerovaných GPU.
Díky dalšímu využití otevřeného rámce pro učení robotů NVIDIA Isaac Lab a NVIDIA Omniverse knihoven jsou možné vysoce přesné simulace úloh, které bylo tradičně obtížné reprodukovat - například manipulace s flexibilními součástmi, jako jsou kabely, nebo provádění operací vkládání a montáže. Roboty pracující v Isaac Sim si díky integraci s ROBOGUIDE zachovávají identické trajektorie a doby cyklů jako skutečné stroje, čímž se odstraňuje rozdíl mezi simulací a realitou. Toto kombinované prostředí také podporuje učení posilováním a učení napodobováním, což urychluje vyhodnocování a nasazování fyzikálních systémů umělé inteligence.
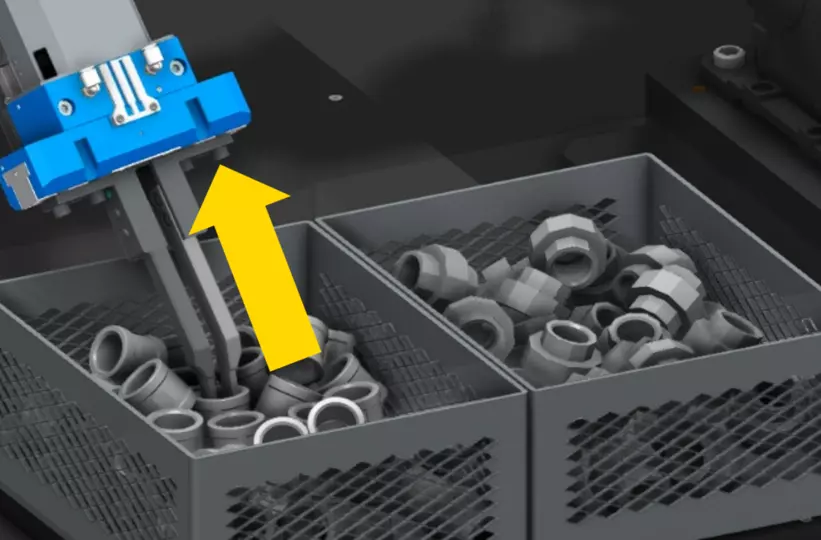
Druhý režim integrace staví do popředí ROBOGUIDE, zatímco fyzikální engine NVIDIA PhysX zajišťuje pokročilou simulaci na pozadí. Díky tomuto vylepšení nyní ROBOGUIDE využívá PhysX, což umožňuje přesnou simulaci složitých úloh, jako je bin picking, které byly dříve obtížně simulovatelné. Náhodně naskládané díly lze realisticky simulovat pomocí fyzikálního modelování, zatímco 3D Vision systém v ROBOGUIDE určuje jejich polohu a umožňuje robotům provádět pick‑and‑place operace. Reálné situace – například moment, kdy robot nedokáže konkrétní díl vyjmout a musí zvolit jiný – lze věrně replikovat ve virtuálním prostředí.
Tento pokrok umožňuje uživatelům dokončit studie proveditelnosti systémů vychystávání do zásobníků ve virtuálním prostředí, což eliminuje potřebu rozsáhlých pokusů a omylů s použitím skutečných dílů. V kombinaci s NVIDIA PhysX ROBOGUIDE výrazně zvyšuje efektivitu designu a nasazování systémů vychystávání do zásobníků, které dříve vyžadovaly značný čas a odborné znalosti přímo na místě.
2. Robot FANUC a základní model robota NVIDIA GR00T N pro skládání triček pomocí imitačního učení
Na květnové přehlídce nových produktů FANUC Open House předvádí systém Dual-Arm využívající dva kolaborativní roboty CRX (koboty) pro skládání triček pomocí imitačního učení s využitím otevřeného základního modelu robota NVIDIA NVIDIA Isaac GR00T N. Skládání ohebných předmětů, jako jsou trička, vyžaduje průběžné přizpůsobování pohybu robota měnícím se tvarům, což je obtížné dosáhnout pomocí běžného učení přehrávání nebo kompenzace dráhy robota založené na vidění. V této ukázce operátor provádí úlohu skládání pomocí robotů CRX a systém se z těchto příkladů učí pomocí imitačního učení. Dvouramenný systém CRX je vycvičen k replikování úlohy a osvojení si technik potřebných k dokončení procesu skládání.
Pomocí pohybů generovaných v reálném čase prostřednictvím imitačního učení roboti CRX autonomně skládají trička a zároveň vizuálně rozpoznávají objekt pomocí kamer. Tradičně měly pohyby robotů naučených imitací tendenci vypadat segmentovaně a trhaně. Kombinací pokročilé technologie řízení pohybu společnosti FANUC s modelem NVIDIA GR00T N dosahuje systém plynulého, nepřetržitého pohybu. Návštěvníci si mohou vyzkoušet živou ukázku dvouramenného robota, který v reálném čase autonomně skládá trička.

3. Robotický systém FANUC poháněný platformou NVIDIA Jetson Thor
Na mezinárodní výstavě robotů 2025 v Tokiu představila společnost FANUC "robota s umělou inteligencí, který předchází kolizím s lidmi" založeného na otevřené platformě robotů FANUC. Systém byl vylepšen nejnovějším počítačem pro robotiku společnosti NVIDIA NVIDIA Jetson Thor.
Výměnou Modulu NVIDIA Jetson AGX Orin za modul Jetson T5000 se výpočetní výkon systému AI zlepšil více než 7,5krát. Na výstavě si návštěvníci mohou vyzkoušet robota, který se rychleji a plynuleji vyhýbá pohybu člověka a využívá přitom výkonných schopností systému Jetson Thor.
Na výstavě nových produktů FANUC Open House letos v květnu si návštěvníci na vlastní kůži vyzkouší ovládání robotů ve virtuálním prostoru, vysoce přesné simulace, fyzikální simulace s využitím NVIDIA PhysX, ukázky dvouramenných robotů vycvičených pomocí imitačního učení na základním modelu robota NVIDIA a kolaborativní robotické systémy s nejnovější výpočetní platformou NVIDIA edge.
Další novinky

Vývoj robotiky s empatií


Inteligentní roboty pro komerční prádelny

Roboty opravují železniční tratě

Mistrovství Evropy mladých expertů v robotice

Společnost FANUC představí na veletrhu EMO Hannover 2023 budoucí CNC platformu

Mladí integrátoři robotiky v centru pozornosti

Udržitelnost, energetická účinnost a spolehlivost v centru pozornosti FANUC FAKUMA

Společnost FANUC dodává svého miliontého robota FANUC

Řešení pro průmysl obráběcích strojů

FANUC a Volvo Cars uzavřely globální smlouvu.

Ocenění za šetrnost k životnímu prostředí
FANUC pohání stroje k maximálním výkonu
