FANUC își consolidează colaborarea cu NVIDIA
1. Operarea intuitivă a roboților într-o "fabrică virtuală" cu ajutorul NVIDIA Isaac Sim & ROBOGUIDE
FANUC a consolidat și mai mult integrarea dintre cadrul de referință deschis de simulare a roboților de la NVIDIA NVIDIA Isaac Sim și software-ul de simulare a roboților de la FANUC ROBOGUIDE, permițând operarea intuitivă într-o fabrică virtuală și realizarea de gemeni digitali de mare precizie, integrați perfect.
La Expoziția Internațională de Roboți desfășurată în decembrie anul trecut la Tokyo, FANUC a demonstrat tehnologia care importă simulările de mișcare ale roboților create în ROBOGUIDE în NVIDIA Isaac Sim, reproducând traiectorii precise și timpi de ciclu într-un mediu virtual folosind aceiași algoritmi de control ca și robotul real. Acum, cu integrarea îmbunătățită, cele două sisteme sunt integrate mai strâns, oferind un mediu de simulare și mai practic și mai eficient pentru testarea roboților și punerea în funcțiune virtuală.
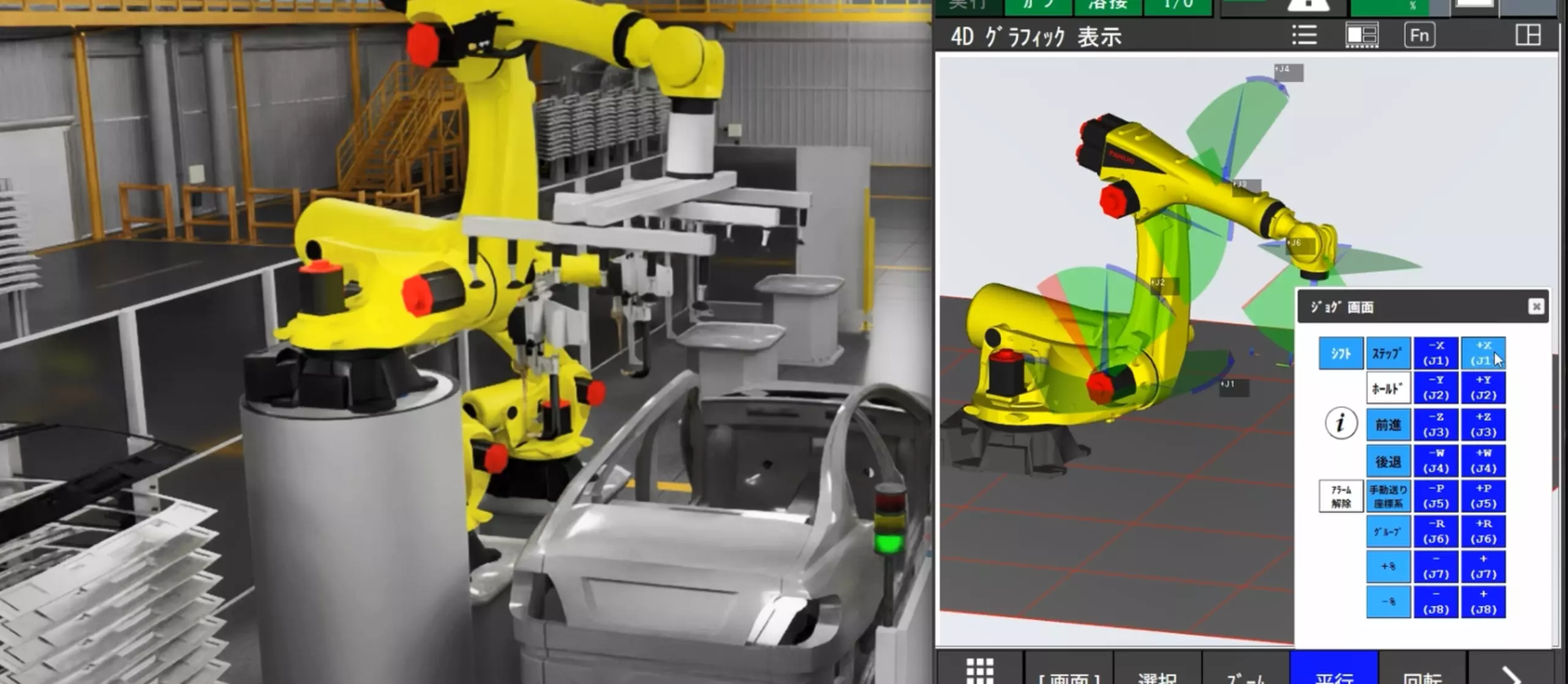
Primul mod de integrare plasează NVIDIA Isaac Sim în prim plan, ROBOGUIDE operând în fundal pentru a asigura comportamentul precis al robotului în spațiul virtual. ROBOGUIDE este strâns integrat cu Isaac Sim, cu o comunicare directă continuă. În acest nou mediu, utilizatorii pot acționa intuitiv roboții din Isaac Sim în timp real de la pandantivele virtuale sau fizice de predare conectate la ROBOGUIDE - exact ca și cum ar controla un robot real. Utilizatorii pot efectua operațiuni de jogging, preda programe robotice, executa programe și verifica rezultatele direct în Isaac Sim. Acest lucru permite realizarea de studii de preinstalare intuitive și eficiente și proiectarea de procese pentru roboți în cadrul unor simulări de mediu și senzori cu acuratețe fizică accelerate de GPU.
Prin valorificarea în continuare a cadrului deschis de învățare robotică NVIDIA Isaac Lab și a bibliotecilor NVIDIA Omniverse, devin posibile simulări de înaltă precizie ale unor sarcini care în mod tradițional erau dificil de reprodus - cum ar fi manipularea componentelor flexibile precum cablurile sau efectuarea de operațiuni de inserție și asamblare. Roboții care operează în Isaac Sim mențin traiectorii și timpi de ciclu identici cu mașinile reale prin integrarea cu ROBOGUIDE, eliminând decalajul dintre simulare și realitate. Acest mediu combinat susține, de asemenea, învățarea prin consolidare și învățarea prin imitație, accelerând evaluarea și implementarea sistemelor fizice de inteligență artificială.
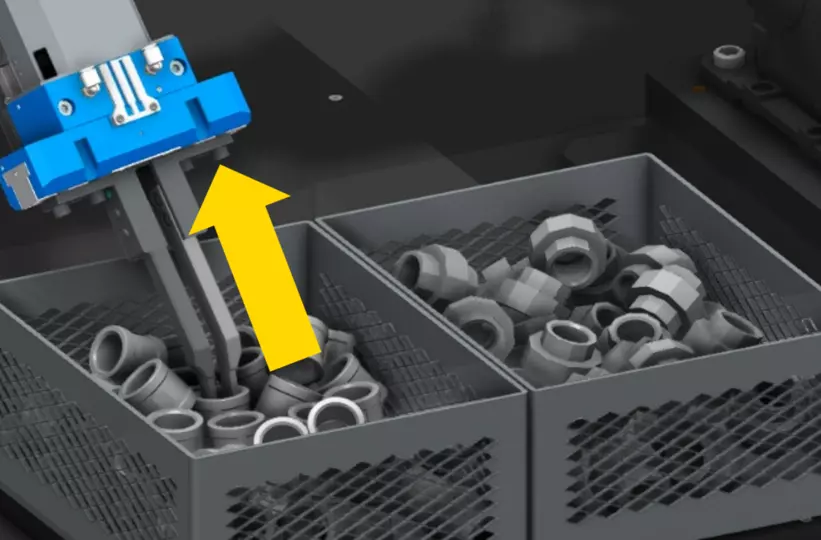
Al doilea mod de integrare plasează ROBOGUIDE în prim-plan, în timp ce motorul fizic NVIDIA PhysX permite simularea avansată în fundal. Cu această îmbunătățire, ROBOGUIDE utilizează acum PhysX, permițând simularea precisă a unor sarcini complexe, cum ar fi ridicarea pubelelor, care anterior erau dificil de simulat. Piesele stivuite aleatoriu pot fi simulate în mod realist folosind modelarea bazată pe fizică, în timp ce sistemul 3D Vision al ROBOGUIDE identifică pozițiile pieselor și permite roboților să efectueze operațiuni de preluare și plasare. Scenariile din lumea reală - cum ar fi determinarea momentului în care un robot nu poate extrage o anumită piesă și selectarea unei alternative - pot fi reproduse virtual.
Acest progres le permite utilizatorilor să finalizeze studiile de fezabilitate pentru sistemele de preluare a pubelelor într-un mediu virtual, eliminând necesitatea unor încercări și erori extensive folosind piese reale. Combinat cu NVIDIA PhysX, ROBOGUIDE îmbunătățește în mod semnificativ eficiența proiectării și implementării sistemelor de ridicare a pubelelor care anterior necesitau timp și expertiză considerabile la fața locului.
2. Robotul FANUC și modelul de bază al robotului NVIDIA GR00T N pentru împăturirea tricourilor prin învățare prin imitație
La expoziția New Product Open House Show din mai, FANUC demonstrează un sistem Dual-Arm folosind doi roboți colaborativi CRX (cobots) pentru împăturirea tricourilor prin învățare prin imitație, folosind modelul de bază deschis al robotului NVIDIA NVIDIA Isaac GR00T N. Plierea obiectelor flexibile, cum ar fi tricourile, necesită adaptarea continuă a mișcării robotice la schimbarea formei, ceea ce o face dificil de realizat cu ajutorul învățării prin redare convenționale sau al compensării traiectoriei robotului pe bază de viziune. În această demonstrație, un operator îndeplinește sarcina de pliere cu ajutorul roboților CRX, iar sistemul învață din aceste exemple prin învățare prin imitație. Sistemul CRX cu două brațe este antrenat să reproducă sarcina și să dobândească tehnicile necesare pentru a finaliza procesul de pliere.
Cu mișcări generate în timp real prin învățarea prin imitație, roboții CRX pliază în mod autonom tricouri în timp ce recunosc vizual obiectul cu ajutorul camerelor. În mod tradițional, mișcările robotice învățate prin imitație aveau tendința de a apărea segmentate și sacadate. Prin combinarea tehnologiei avansate de control al mișcării de la FANUC cu modelul NVIDIA GR00T N, sistemul realizează mișcări netede și continue. Vizitatorii pot experimenta o demonstrație live a robotului cu două brațe care împăturește autonom tricouri în timp real.

3. Sistemul robot FANUC alimentat de platforma NVIDIA Jetson Thor
La Expoziția Internațională de Roboți 2025 din Tokyo, FANUC a prezentat un "robot AI care evită coliziunea cu oamenii" bazat pe platforma deschisă a robotului FANUC. Sistemul a fost actualizat cu cel mai recent computer robotic NVIDIA NVIDIA Jetson Thor.
Înlocuind modulul NVIDIA Jetson AGX Orin cu modulul Jetson T5000, calculul AI al sistemului a fost îmbunătățit de peste 7,5 ori. La expoziție, vizitatorii pot experimenta un robot care evită mișcarea unui om mai rapid și mai lin, utilizând capacitățile puternice ale Jetson Thor.
La expoziția FANUC New Product Open House din luna mai a acestui an, vizitatorii pot experimenta direct funcționarea roboților într-un spațiu virtual, simulări de înaltă precizie, simulări de fizică utilizând NVIDIA PhysX, demonstrații de roboți cu două brațe antrenați prin învățare prin imitație pe modelul de bază al roboților NVIDIA și sisteme de roboți colaborativi cu cea mai recentă platformă de calcul edge NVIDIA.
Alte știri

Dezvoltarea roboților cu empatie


Roboți inteligenți pentru spălătoriile comerciale

Roboții repară șinele de cale ferată

Campionatul european pentru tinerii experți în robotică

FANUC oferă o imagine a noii platforme CNC la EMO Hanovra 2023

Tinerii integratori de roboți în lumina reflectoarelor

Sustenabilitatea, eficiența energetică și fiabilitatea în centrul expoziției FANUC FAKUMA

FANUC expediază robotul cu numărul un milion

Soluții pentru industria mașinilor-unelte

FANUC și Volvo Cars semnează un contract global

Premiul pentru protejarea climei
FANUC conduce mașinile la performanțe de vârf
