FANUC refuerza su colaboración con NVIDIA
1. Funcionamiento intuitivo de robots en una "fábrica virtual" con NVIDIA Isaac Sim y ROBOGUIDE
FANUC ha reforzado aún más la integración entre el marco de referencia abierto de simulación de robots de NVIDIA NVIDIA Isaac Sim y el software de simulación de robots ROBOGUIDE de FANUC, lo que permite un funcionamiento intuitivo dentro de una fábrica virtual y la creación de gemelos digitales de alta precisión perfectamente integrados.
En la Feria Internacional de Robótica celebrada el pasado mes de diciembre en Tokio, FANUC demostró la tecnología que importa a NVIDIA Isaac Sim las simulaciones de movimiento de robots creadas en ROBOGUIDE, reproduciendo trayectorias y tiempos de ciclo precisos en un entorno virtual utilizando los mismos algoritmos de control que el robot real. Ahora, con la las últimas mejoras, los dos sistemas están más integrados, proporcionando un entorno de simulación aún más práctico y eficiente para las pruebas de robots y la puesta en marcha virtual.
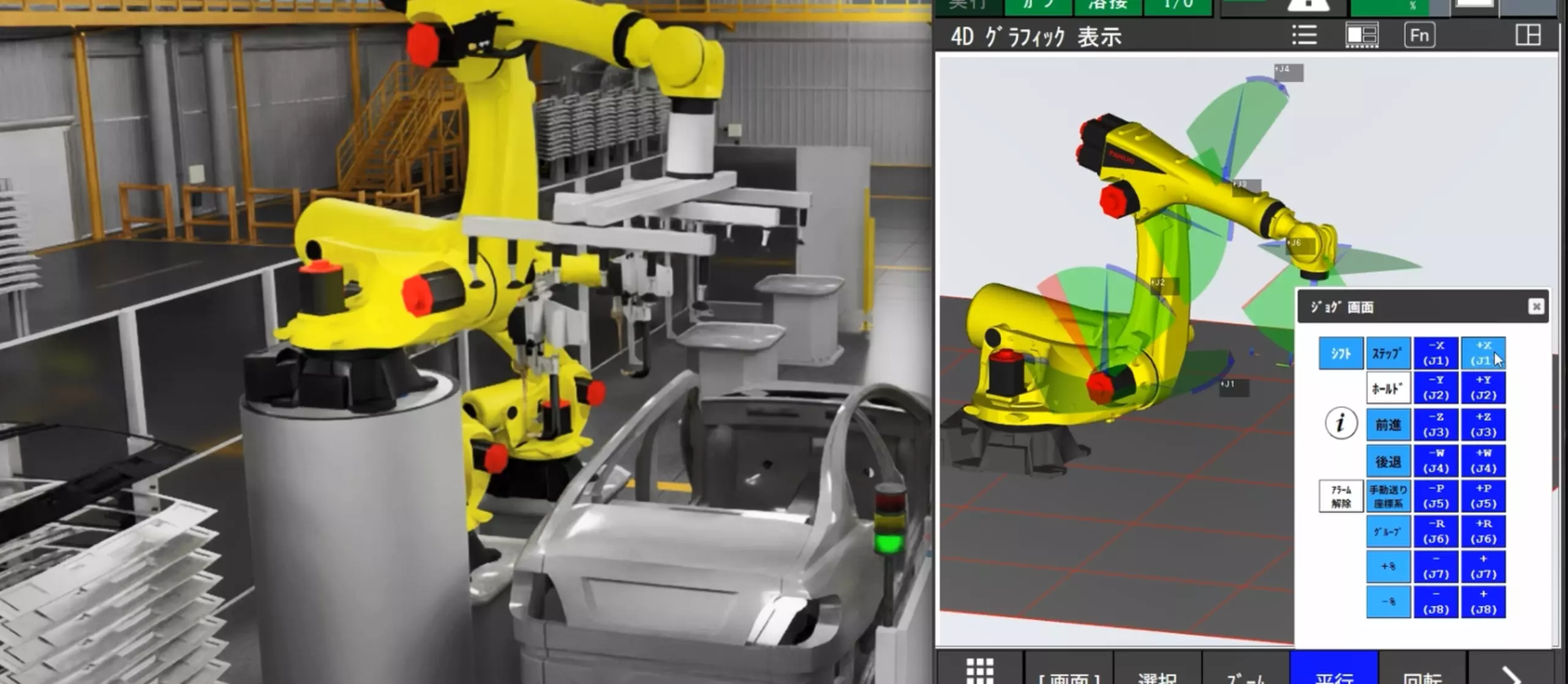
El primer modo de integración sitúa a NVIDIA Isaac Sim en primer plano, con ROBOGUIDE operando en segundo plano para garantizar un comportamiento preciso del robot en el espacio virtual. ROBOGUIDE está estrechamente integrado con Isaac Sim, con comunicación directa continua. En este nuevo entorno, los usuarios pueden manejar intuitivamente robots en Isaac Sim en tiempo real desde teach pendants virtuales o físicos conectados a ROBOGUIDE, como si estuvieran controlando un robot real. Los usuarios pueden realizar operaciones de jogging, enseñar programas de robots, ejecutar los programas y verificar los resultados directamente dentro de Isaac Sim. Esto permite realizar estudios de preinstalación y diseño de procesos para robots de forma intuitiva y eficiente.
Al aprovechar aún más el marco de aprendizaje abierto para robots de NVIDIA Isaac Lab y las librerías NVIDIA Omniverse, es posible realizar simulaciones de alta precisión de tareas que tradicionalmente eran difíciles de reproducir, como la manipulación de componentes flexibles como cables o la realización de operaciones de inserción y ensamblaje. Los robots que operan en Isaac Sim mantienen trayectorias y tiempos de ciclo idénticos a los de las máquinas reales gracias a la integración con ROBOGUIDE, lo que elimina la brecha entre simulación y realidad. Este entorno combinado también admite el aprendizaje por refuerzo y el aprendizaje por imitación, lo que acelera la evaluación y el despliegue de sistemas físicos de IA.
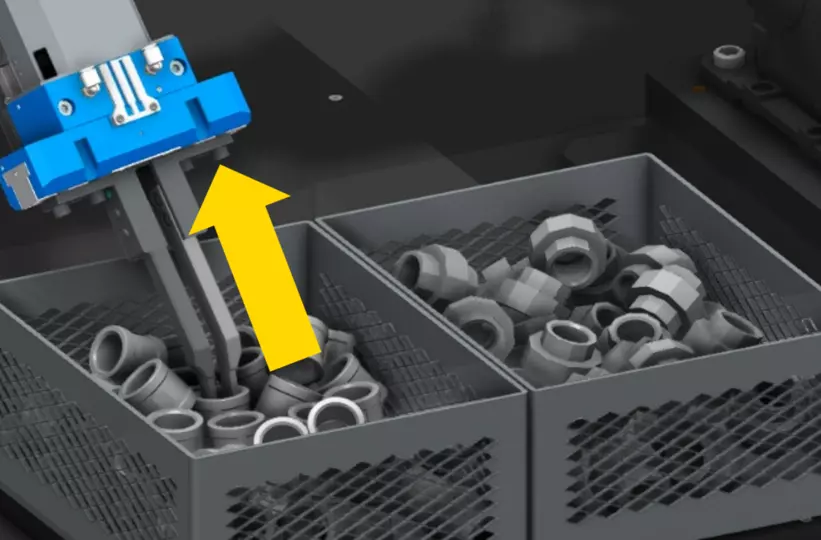
El segundo modo de integración sitúa a ROBOGUIDE en primer plano, mientras que el motor de física NVIDIA PhysX permite la simulación avanzada en segundo plano. Con esta mejora, ROBOGUIDE utiliza ahora PhysX, lo que permite simular con precisión tareas complejas como la recogida de contenedores, que antes eran difíciles de simular. Las piezas apiladas aleatoriamente pueden simularse de forma realista mediante un modelado basado en la física, mientras que el sistema de visión 3D de ROBOGUIDE identifica las posiciones de las piezas y permite a los robots realizar operaciones de pick&place. Las situaciones reales, como determinar cuándo un robot no puede extraer una pieza concreta y seleccionar una alternativa, pueden reproducirse virtualmente.
Este avance permite a los usuarios completar estudios de viabilidad de sistemas de bin picking en un entorno virtual, lo que elimina la necesidad de realizar extensas pruebas de ensayo y error con piezas reales. Combinado con NVIDIA PhysX, ROBOGUIDE mejora significativamente la eficiencia del diseño y la implantación de sistemas de bin picking que antes requerían mucho tiempo y experiencia in situ.
2. Robot FANUC y modelo de base robótica NVIDIA GR00T N para doblar camisetas mediante aprendizaje por imitación
En su presentación de nuevos productos en mayo, FANUC ha mostrado un sistema de doble brazo que utiliza dos robots colaborativos CRX (cobots) para doblar camisetas mediante aprendizaje por imitación, utilizando el modelo de base robótica abierta de NVIDIA NVIDIA Isaac GR00T N. El plegado de objetos flexibles como camisetas requiere una adaptación continua del movimiento del robot a las formas cambiantes, lo que dificulta su consecución mediante la enseñanza convencional de la reproducción o la compensación de la trayectoria del robot basada en la visión. En esta demostración, un operario realiza la tarea de doblado utilizando robots CRX, y el sistema aprende de estos ejemplos mediante el aprendizaje por imitación. El sistema CRX de doble brazo se entrena para reproducir la tarea y adquirir las técnicas necesarias para completar el proceso de plegado.
Con movimientos generados en tiempo real mediante el aprendizaje por imitación, los robots CRX doblan camisetas de forma autónoma mientras reconocen visualmente el objeto mediante cámaras. Tradicionalmente, los movimientos robóticos aprendidos por imitación solían aparecer segmentados y entrecortados. Al combinar la avanzada tecnología de control de movimiento de FANUC con el modelo GR00T N de NVIDIA, el sistema consigue movimientos suaves y continuos.

3. Sistema robótico de FANUC impulsado por la plataforma NVIDIA Jetson Thor
En la feria de diciembre en Tokio, FANUC presentó un "robot con inteligencia artificial que evita la colisión con humanos" basado en la plataforma abierta de robots FANUC. El sistema se ha actualizado con el último ordenador robótico de NVIDIA NVIDIA Jetson Thor.
Al sustituir el módulo NVIDIA Jetson AGX Orin por el módulo Jetson T5000, el cálculo de IA del sistema se ha multiplicado por más de 7,5. En la exposición, se ha mostrado un robot que evita el movimiento de un humano de forma más rápida y fluida, utilizando las potentes capacidades de Jetson Thor.
En el Open HOuse de FANUC, los visitantes han podido experimentar de primera mano el funcionamiento de robots en un espacio virtual, simulaciones de alta precisión, simulaciones de física utilizando NVIDIA PhysX, demostraciones de robots de doble brazo entrenados mediante aprendizaje por imitación en el modelo de base robótica de NVIDIA y sistemas de robots colaborativos dotados de la última plataforma de edge computing de NVIDIA.
Otras noticias

Desarrollar robots con empatía

Robots en la panadería

Robots inteligentes para lavanderías comerciales

Los robots reparan las vías del tren

Campeonato Europeo de Jóvenes Expertos en Robótica

FANUC presentará la futura plataforma CNC en la EMO Hannover 2023

Jóvenes integradores de robots en el punto de mira

Sostenibilidad, eficiencia energética y fiabilidad en el corazón de FANUC FAKUMA Display

FANUC fabrica su robot un millón

Soluciones para la industria de máquinas herramienta

FANUC y Volvo Cars firman un contrato global

Premio al respeto por el medioambiente
FANUC lleva sus máquinas al máximo rendimiento
