FANUC renforce sa collaboration avec NVIDIA
1. Fonctionnement intuitif des robots dans une " usine virtuelle " grâce à NVIDIA Isaac Sim & ROBOGUIDE
FANUC a encore renforcé l'intégration entre le cadre de référence ouvert de simulation de robot de NVIDIA NVIDIA Isaac Sim et le logiciel de simulation de robot de FANUC, ROBOGUIDE, permettant un fonctionnement intuitif au sein d'une usine virtuelle et la réalisation de jumeaux numériques très précis et intégrés de façon transparente.
Lors de l'exposition internationale de robots qui s'est tenue en décembre dernier à Tokyo, FANUC a présenté la technologie qui importe les simulations de mouvements de robots créées dans ROBOGUIDE dans NVIDIA Isaac Sim, reproduisant des trajectoires et des temps de cycle précis dans un environnement virtuel à l'aide des mêmes algorithmes de contrôle que le robot réel. Désormais, avec l'intégration améliorée, les deux systèmes sont plus étroitement intégrés, offrant un environnement de simulation encore plus pratique et efficace pour les tests de robots et la mise en service virtuelle.
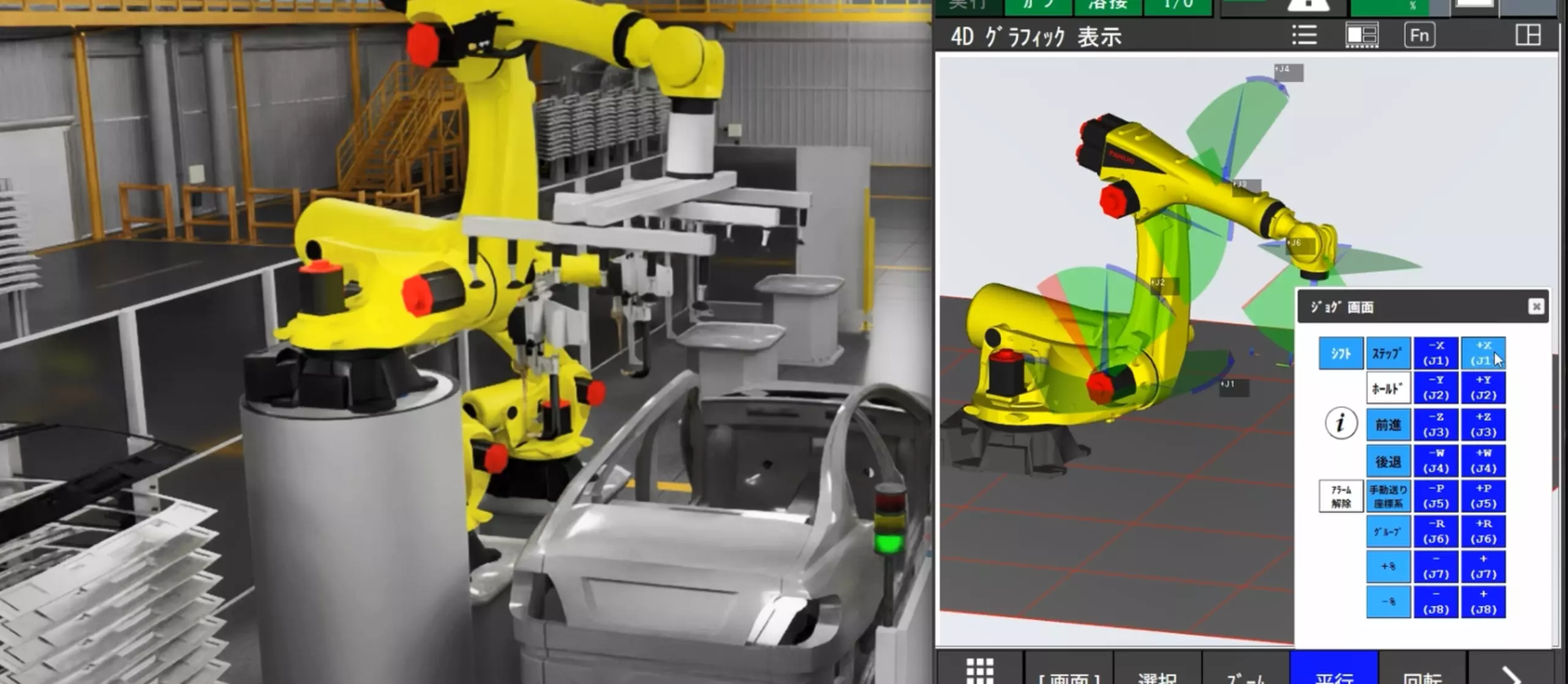
Le premier mode d'intégration place NVIDIA Isaac Sim au premier plan, ROBOGUIDE fonctionnant en arrière-plan pour assurer un comportement précis du robot dans l'espace virtuel. ROBOGUIDE est étroitement intégré à Isaac Sim, avec une communication directe et continue. Dans ce nouvel environnement, les utilisateurs peuvent intuitivement commander des robots dans Isaac Sim en temps réel à partir de pendentifs d'apprentissage virtuels ou physiques connectés à ROBOGUIDE - comme s'ils contrôlaient un robot réel. Les utilisateurs peuvent effectuer des opérations de jogging, enseigner des programmes de robot, exécuter les programmes et vérifier les résultats directement dans Isaac Sim. Cela permet de réaliser des études intuitives et efficaces de pré-installation et de conception de processus pour les robots au sein de simulations de capteurs et d'environnement physiquement précises et accélérées par le GPU.
En s'appuyant davantage sur le cadre ouvert d'apprentissage des robots NVIDIA Isaac Lab et NVIDIA Omniverse, des simulations de haute performance de tâches traditionnellement difficiles à reproduire - telles que la manutention de composants flexibles comme les câbles ou la réalisation d'opérations d'insertion et d'assemblage - deviennent possibles. Les robots fonctionnant dans Isaac Sim conservent des trajectoires et des temps de cycle identiques à ceux des machines réelles grâce à l'intégration avec ROBOGUIDE, supprimant ainsi l'écart entre la simulation et la réalité. Cet environnement combiné prend également en charge l'apprentissage par renforcement et l'apprentissage par imitation, accélérant ainsi l'évaluation et le déploiement des systèmes physiques d'IA.
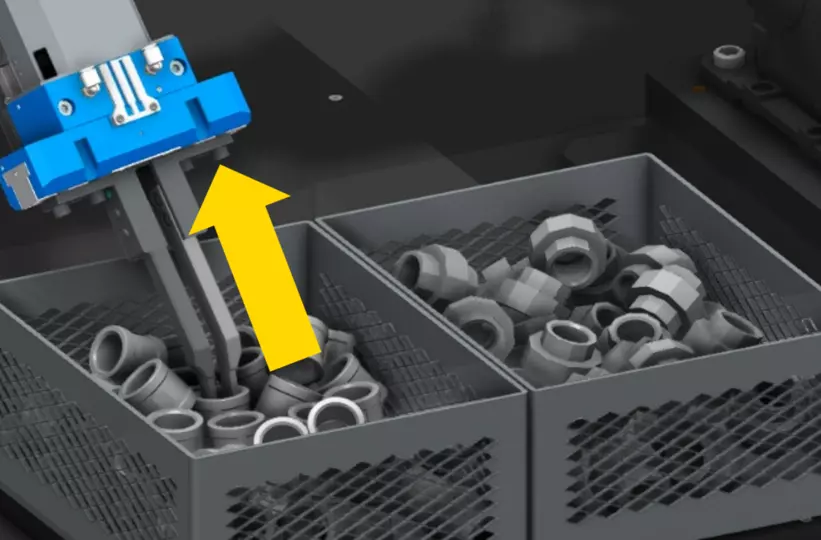
Le second mode d'intégration place ROBOGUIDE au premier plan, tandis que le moteur physique NVIDIA PhysX permet une simulation avancée en arrière-plan. Avec cette amélioration, ROBOGUIDE utilise désormais PhysX, ce qui permet de simuler avec précision des tâches complexes telles que le prélèvement en bac, qui étaient auparavant difficiles à simuler. Les pièces empilées de manière aléatoire peuvent être simulées de manière réaliste grâce à la modélisation basée sur la physique, tandis que le système de vision 3D de ROBOGUIDE identifie les positions des pièces et permet aux robots d'effectuer des opérations de prise et de dépose. Les scénarios du monde réel - tels que la détermination du moment où un robot ne peut pas extraire une pièce spécifique et la sélection d'une alternative - peuvent être reproduits virtuellement.
Cette avancée permet aux utilisateurs de réaliser des études de faisabilité pour les systèmes de prélèvement en bac dans un environnement virtuel, éliminant ainsi la nécessité de procéder à des essais et des erreurs approfondis en utilisant des pièces réelles. Associé à NVIDIA PhysX, ROBOGUIDE améliore considérablement l'efficacité de la conception et du déploiement des systèmes de prélèvement en bacs qui nécessitaient auparavant beaucoup de temps et d'expertise sur site.
Cette avancée permet aux utilisateurs de réaliser des études de faisabilité pour les systèmes de prélèvement en bacs dans un environnement virtuel.
2. Robot FANUC et modèle de base de robot NVIDIA GR00T N pour plier des T-shirts par apprentissage par imitation
Lors de son salon des nouveaux produits en mai, FANUC a fait la démonstration d'un système à deux bras utilisant deux robots collaboratifs CRX (cobots) pour plier des T-shirts par apprentissage par imitation, en utilisant le modèle de base de robot ouvert de NVIDIA NVIDIA Isaac GR00T N. Le pliage d'objets flexibles tels que les T-shirts nécessite une adaptation continue du mouvement du robot aux formes changeantes, ce qui est difficile à réaliser à l'aide d'un apprentissage par lecture conventionnel ou d'une compensation de trajectoire du robot basée sur la vision. Dans cette démonstration, un opérateur effectue la tâche de pliage à l'aide de robots CRX, et le système apprend à partir de ces exemples grâce à l'apprentissage par imitation. Le système CRX à deux bras est entraîné à reproduire la tâche et à acquérir les techniques nécessaires pour mener à bien le processus de pliage.
Avec des mouvements générés en temps réel grâce à l'apprentissage par imitation, les robots CRX plient de manière autonome des T-shirts tout en reconnaissant visuellement l'objet à l'aide de caméras. Traditionnellement, les mouvements des robots appris par imitation avaient tendance à être segmentés et saccadés. En associant la technologie avancée de contrôle des mouvements de FANUC au modèle NVIDIA GR00T N, le système permet d'obtenir des mouvements fluides et continus. Les visiteurs peuvent assister à une démonstration en direct du robot à deux bras qui plie des T-shirts de manière autonome et en temps réel.
Spanique.

3. Système de robot FANUC alimenté par la plateforme NVIDIA Jetson Thor
Lors de l'exposition internationale de robots 2025 à Tokyo, FANUC a présenté un " robot IA qui évite les collisions avec les humains " basé sur la plateforme ouverte du robot FANUC. Le système a été mis à niveau avec le dernier ordinateur robotique de NVIDIA NVIDIA Jetson Thor.
En remplaçant le module NVIDIA Jetson AGX Orin par le module Jetson T5000, le calcul de l'IA du système a été amélioré de plus de 7,5 fois. Lors de l'exposition, les visiteurs pourront découvrir un robot qui évite les mouvements d'un être humain plus rapidement et plus facilement, grâce aux puissantes capacités de Jetson Thor.
Lors de l'exposition portes ouvertes des nouveaux produits de FANUC en mai, les visiteurs découvriront directement le fonctionnement des robots dans un espace virtuel, des simulations de haute précision, des simulations physiques utilisant NVIDIA PhysX, des démonstrations de robots à deux bras formés par apprentissage par imitation sur le modèle de fondation de robot de NVIDIA, et des systèmes de robots collaboratifs dotés de la toute dernière plateforme informatique de bord de NVIDIA.
Autres nouvelles

Développer des robots empathiques

Des robots dans la boulangerie

Robots intelligents pour les blanchisseries commerciales

Des robots réparent les voies ferrées

Championnat européen des jeunes experts en robotique

FANUC donnera un aperçu de la future plateforme CNC à l'EMO de Hanovre 2023

Les jeunes intégrateurs de robots sous les feux de la rampe

Durabilité, efficacité énergétique et fiabilité au cœur de l'exposition de FANUC FAKUMA

FANUC expédie son millionième robot

Solutions pour l'industrie des machines-outils

FANUC et Volvo Cars signent un contrat global

Prix du respect du climat
FANUC permet aux machines d'atteindre des performances maximales
